Visão geral do sensor de Tempo-de-Voo (Time-of-Flight)


O que são sensores de tempo de voo? Esses são dispositivos versáteis com um conjunto diversificado de recursos, como detecção de objetos, estimativa de profundidade e classificação de objetos. Aplicações específicas incluem gerenciamento/contagem de estoque, rastreamento de pessoas e monitoramento de estacionamento. Além desses aplicativos úteis, mas aparentemente mundanos, os sensores Time-of-Flight (ToF) podem ser integrados e expandidos em aplicativos mais exclusivos.
Uma dessas aplicações interessantes é uma porta secreta automática inteligente. Imagine o herói de um filme de espionagem tentando abrir uma porta secreta parando em um corredor ao lado de um vaso indefinido enquanto faz uma série de gestos. De repente, uma porta se abre para uma sala escondida cheia de informações secretas. Usando apenas um único sensor ToF, a porta secreta automática inteligente permanece segura, permitindo a entrada apenas para pessoas que sabem onde ficar (uma parte específica da sala) e sabem realizar gestos secretos (múltiplos, se necessário). Outra aplicação para sensores ToF é o monitoramento de postura ou técnica em esportes. Por exemplo, um sensor ToF pode ajudar a aperfeiçoar a técnica de um golfista monitorando sua postura.
Como integramos um sensor Time-of-Flight e o que é necessário para essas aplicações empolgantes? Continue lendo para entender como os sensores ToF funcionam e como eles podem ser integrados em um determinado aplicativo, bem como o que considerar ao usar sensores ToF.
O que é o sensor de tempo de voo: noções básicas
Como o nome sugere, os sensores Time-of-Flight usam o tempo para a luz (geralmente infravermelho, ~850nm) ou som emitido (ultrassônico) para “voar” e refletir objetos para medir a distância. O princípio de funcionamento desses sensores é extremamente simples. Para maior simplicidade, os sensores ópticos ToF serão nosso único foco.
Os sensores ToF podem ser divididos em duas categorias com base em como eles medem a distância: diretos e indiretos. Os sensores ToF diretos medem diretamente o tempo para que um determinado pulso de luz seja transmitido pelo sensor, refletido no objeto de interesse e recebido no detector. Sensores ToF diretos normalmente enviam modulações pulsadas para medir a distância. Para um sensor ToF direto, a distância é medida pela seguinte equação:
d = (c ⋅ Δt) / 2
Onde Δt é a diferença de tempo,
e c é a velocidade da luz.
Os sensores ToF indiretos, por outro lado, medem as diferenças de fase relativas entre os pulsos. Assim, ao longo de uma série de pulsos transmitidos pelo sensor, refletidos no objeto de interesse e recebidos no detector, a distância pode ser medida observando a diferença de fase do sinal retornado para o sinal transmitido. Os sensores ToF indiretos geralmente enviam modulações de onda contínua (CW) para medir a distância. Para um sensor ToF indireto, a distância é medida pela seguinte equação:
d = (c / 2ƒ m ) ⋅ (Δθ / 2π)
Onde Δθ é a diferença de fase,
ƒ m é a frequência de modulação,
e c é a velocidade da luz.
As diferenças entre sensores ToF diretos e indiretos estão resumidas na Tabela 1 , embora existam exceções a alguns dos critérios.
Tabela 1: Tipos de sensores ToF: Medição indireta e direta (Fonte: Autor)
| Sensor ToF Indireto | Sensor ToF Direto |
| 🗶 Aliasing (ambiguidade) | ✔ Sem aliasing (sem ambigüidade) |
| 🗶 Integração mais lenta (várias amostras) | ✔ Aquisição mais rápida |
| ✔ Maior contagem de pixels | 🗶 Menor contagem de pixels |
| ✔ Menor potência de pico transmitida (CW) | 🗶 Maior potência de pico transmitida |
| 🗶 Gama inferior (depende da frequência de modulação) | ✔ Maior alcance |
| ✔ Menor volume de dados | 🗶 Maior volume de dados |
Os sensores ToF indiretos são mais adequados para aplicações 3D, como reconhecimento de gestos, enquanto os sensores ToF diretos são mais adequados para alcance rápido. A adequação desses sensores para aplicações específicas é baseada em princípios operacionais. Entender como funcionam os sensores ToF ajuda a escolher o sensor correto para a aplicação.
A vida de um fóton para um sensor ToF
As condições operacionais e o ambiente são fundamentais para entender como os sensores ToF funcionam. A Figura 1 mostra a “vida” dos fótons para um sensor ToF e teoricamente onde o ruído pode ocorrer. Vermelho indica locais onde pode ocorrer ruído e/ou afetar o desempenho final do sistema. No receptor, apenas uma pequena fração dos fótons transmitidos será coletada devido à probabilidade de os fótons passarem por essa cadeia de eventos “adequadamente”.

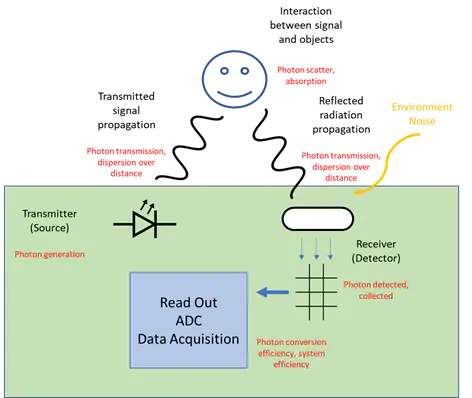
Figura 1: Este diagrama mostra como um fóton interage para um sensor ToF. (Fonte: Autor)
Dispersão de Fótons e Interações
A interação do sinal transmitido (fótons) com o objeto de interesse é extremamente importante para os sensores ToF, pois os fótons podem ter reflexões difusas, reflexões especulares e/ou reflexões espalhadas e serem absorvidos ou espalhados com base no objeto (Figura 2 ) . Por exemplo, se o objeto que está sendo medido tiver uma superfície rugosa (arranjos de rede irregulares) e estiver na escala de um comprimento de onda, o espalhamento difuso será a interação dominante. A maneira como os fótons interagem com o objeto afetará o desempenho de um sensor ToF na prática.

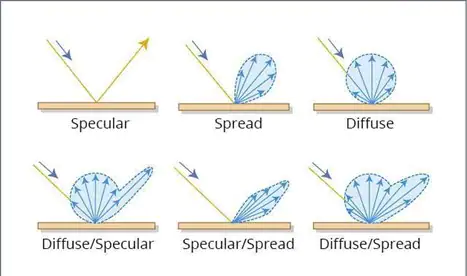
Figura 2: A luz pode se espalhar de várias maneiras diferentes ao interagir com objetos. (Fonte: Terabee)
Comparação de ToF com sistemas de detecção óptica 3D
Os sensores ToF podem ser comparados a dois outros sistemas de detecção óptica 3D: sensores de luz estruturados e sistemas de visão estéreo. Não existe “melhor sensor”: Tabela 2 e Tabela 3 destacam os prós e contras dos sensores ToF.
Tabela 2: Profissionais de alto nível dos sensores ToF (Fonte: Autor)
| Vantagens dos sensores ToF |
| Tamanho compacto e fácil de usar |
| Alta precisão e resposta rápida |
| Boa resolução espacial |
Tabela 3: Coisas a considerar ao usar sensores ToF (Fonte: Autor)
| Contras dos sensores ToF |
| Artefatos podem estar presentes (desfoque de movimento) |
| A calibração pode ser difícil |
| Robusto à luz ambiente, mas pode degradar rapidamente |
Os sensores ToF claramente têm algumas vantagens sobre os sistemas de detecção óptica 3D, mas um engenheiro de projeto deve considerar todas as possibilidades ao tomar uma decisão. A Tabela 4 destaca as vantagens e desvantagens dos sistemas de detecção óptica 3D em comparação direta com os sensores ToF (novamente, observe que existem exceções).
Tabela 4: Comparação completa de sensores ToF com outros sistemas ópticos de detecção 3D (Fonte: Autor)
| visão estéreo | luz estruturada | ToF | |
| Faixa | < 10 metros | < 5 metros | < 50 metros |
| Custo | Médio | Alto | Baixo |
| Resolução espacial | Alto | Alto | Médio |
| Complexidade | Alto | Alto | Baixo |
| Precisão de Profundidade | Baixo | Alto | Médio |
| Desempenho com pouca luz | Baixo | Alto | Alto |
| Alto desempenho de luz ambiente | Médio | Baixo | Médio |
| Tamanho | Médio | Médio | Baixo |
| artefatos | Alto | Baixo | Alto |
| Campo de visão | < 90 graus | < 90 graus | varia |
| Poder | Baixo | Médio | Médio |
Considerações e erros de integração do sensor ToF
A integração de sensores ToF pode ser relativamente simples (no nível de hobby), pois a maioria dos sensores ToF contém tudo o que é necessário (emissor, receptor e processador) em um único pacote. No entanto, deve-se ter cuidado, dependendo da aplicação e uso. Existem muitas configurações diferentes para sensores ToF, incluindo projetos de emissores, projetos de receptores e/ou recursos operacionais (por exemplo, direcionado, giratório). O design e a fabricação de cada sensor ToF desempenham um papel extremamente importante no desempenho do sensor e nas capacidades que o sensor pode alcançar.
Uma consideração importante para integrar um sensor ToF em um aplicativo é o processo de calibração. Quatro tipos de erros vistos pelos sensores ToF ao medir a faixa no nível mais simplista são mostrados na Figura 3 : Deslocamento constante, fator de escala, precisão/variância de medição e saturação. Avançando, nosso foco estará em um único emissor e um único receptor (pixel).

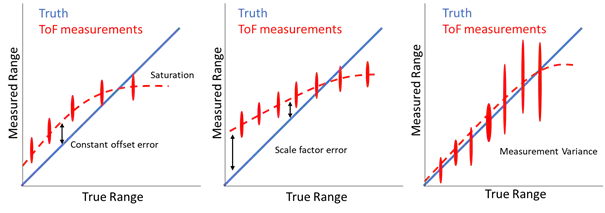
Figura 3: Os erros que aparecem ao usar um sensor ToF são representados.
Erros de ToF e mergulho profundo no ruído
Em aplicações científicas e de engenharia, entender e calibrar as fontes de erro é essencial. Primeiro, porque os sensores ToF são sensores ópticos, as fontes de ruído nos sensores ópticos estão presentes nos sensores ToF. Devemos considerar ruído de padrão fixo e desvios na resposta de pixel de um pixel para o próximo dentro da matriz de plano focal (FPA) do sensor ToF. A responsividade de cada pixel na matriz deve ser compensada em um nível uniforme. Outro tipo de ruído de padrão fixo é a corrente escura e seu ruído de tiro correspondente. Mesmo quando o sensor ToF não estiver iluminado, o ruído ainda estará presente no sensor. Isso deve ser compensado para reduzir os desvios na leitura do FPA. Em geral, o bandgap do sensor é inversamente proporcional ao ruído da corrente escura. À medida que o bandgap diminui, o ruído de corrente escura geralmente aumenta.
Para compensar o ruído de padrão fixo, um processo chamado correção de não uniformidade (NUC) pode ser executado. Este processo inclui medir a matriz em diferentes tempos de integração e ajustar a resposta a um modelo conhecido. Cada pixel deve ser corrigido e alinhado para fornecer uma saída uniforme para uma entrada fixa. Para dar um exemplo (embora não para um sensor ToF), se um NUC for executado corretamente, os resultados serão parecidos com os da Figura 4 .

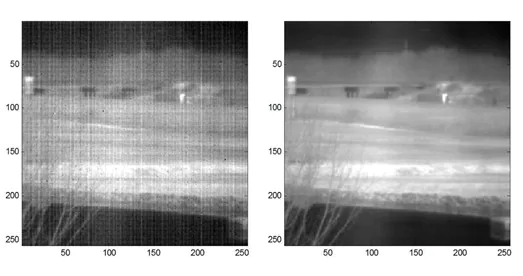
Figura 4: Esta imagem mostra um exemplo de um processo NUC na correção de sensores infravermelhos. Para aplicações de detecção 3D, um processo de calibração será necessário para obter bons resultados.
Outros ruídos do sistema que devem ser considerados incluem ruído térmico, ruído de quantização (conversor analógico para digital), ruído de oscilação, ruído kTC e diafonia. O ruído térmico, em particular, deve ser considerado porque a resposta de um detector também é afetada pela temperatura. A variação variará em função da temperatura e se apresentará como um deslocamento. Esse desvio de temperatura não é uma função do objeto; as causas para esse desvio térmico estão relacionadas às medições de fase do loop travado por atraso.
O ruído ambiental que afetará o desempenho do sensor ToF inclui luz difusa, erro de frente de onda óptica, multipercurso e ruído de iluminação geral devido à refletividade irregular do objeto. Conforme observado acima na discussão de contras para o uso de sensores ToF, os sensores ToF sofrem de artefatos que devem ser corrigidos, como artefatos de movimento. Os artefatos de movimento ocorrem nos limites do objeto e nas reflexões não homogêneas, onde os valores de fase bruta incomparáveis podem flutuar. À medida que a velocidade de movimento aumenta para um determinado tempo de integração, os artefatos de movimento tornam-se mais severos. Para compensar os artefatos de movimento, várias técnicas podem ser empregadas, incluindo compensação de fluxo. Esta compensação deve ser executada enquanto o sensor está em execução e não pode ser tratada como uma calibração.
Exemplo de Sensor ToF
Com essa compreensão dos sensores ToF, podemos revisar, em alto nível, como usar um sensor ToF para rastreamento de objetos.
Usando um sensor ToF, uma nuvem de pontos é primeiro gerada medindo o alcance de muitos pontos de um objeto ou cena. Dependendo da densidade dos retornos/nuvem de pontos do sensor ToF e da precisão das medições de alcance, pode ser feita uma visualização 3D precisa do sensor e do mundo que ele vê. Se a visualização do sensor estiver vazia, exceto por um único objeto, o objeto pode ser rastreado simplesmente observando os retornos que estão em um intervalo diferente do resto da cena. Por outro lado, se a cena estiver confusa, a aplicação de algum processamento de imagem permite que os objetos sejam rastreados com base no recurso do objeto com informações adicionais de profundidade. Um sensor ToF adequado fornece uma “imagem” semelhante a uma câmera, mas com informações de profundidade adicionais.
A resolução do sensor ToF é crítica – semelhante a quando a resolução é muito baixa com uma câmera e uma nuvem de pontos precisa não pode ser feita. Se o alcance não for representativo e o sensor ToF não estiver calibrado, os objetos se misturarão ou as superfícies planas, como uma parede, parecerão ásperas e distorcidas.
Conclusão
Os sensores ToF são versáteis e, se examinados com cuidado, possuem uma profundidade incrível. O uso e o design dos sensores ToF variam devido aos tipos de emissores, detectores, matriz óptica, processamento e embalagem geral. Ruídos e erros de sensores ToF devem ser contabilizados em qualquer aplicação; dependendo do uso do sensor, a calibração e a correção de erros podem se tornar complicadas. Em última análise, os sensores ToF são compactos, têm desempenho incrível e, considerando os recursos, são soluções econômicas para muitos problemas diferentes.




0 Comentários